Robustness 入门
这个笔记记录一些零散的或偏基础的知识
鲁棒性的类别
Benchmarking Neural Network Robustness to Common Corruptions and Perturbations (arxiv.org)
Corruption Robustness
损坏鲁棒性,评估的是对于作用于样本的损坏(corruptions)
Perturbation Robustness
扰动鲁棒性,评估的是在扰动函数 $ \mathcal{E}$ 对样本的作用下,模型在这些受到干扰的样本上做预测的平均性能。
Adversarial Perturbtion
对抗鲁棒性,评估的是样本受到加性的、微小的(限度为
常见数据集
ImageNet-A and ImageNet-O
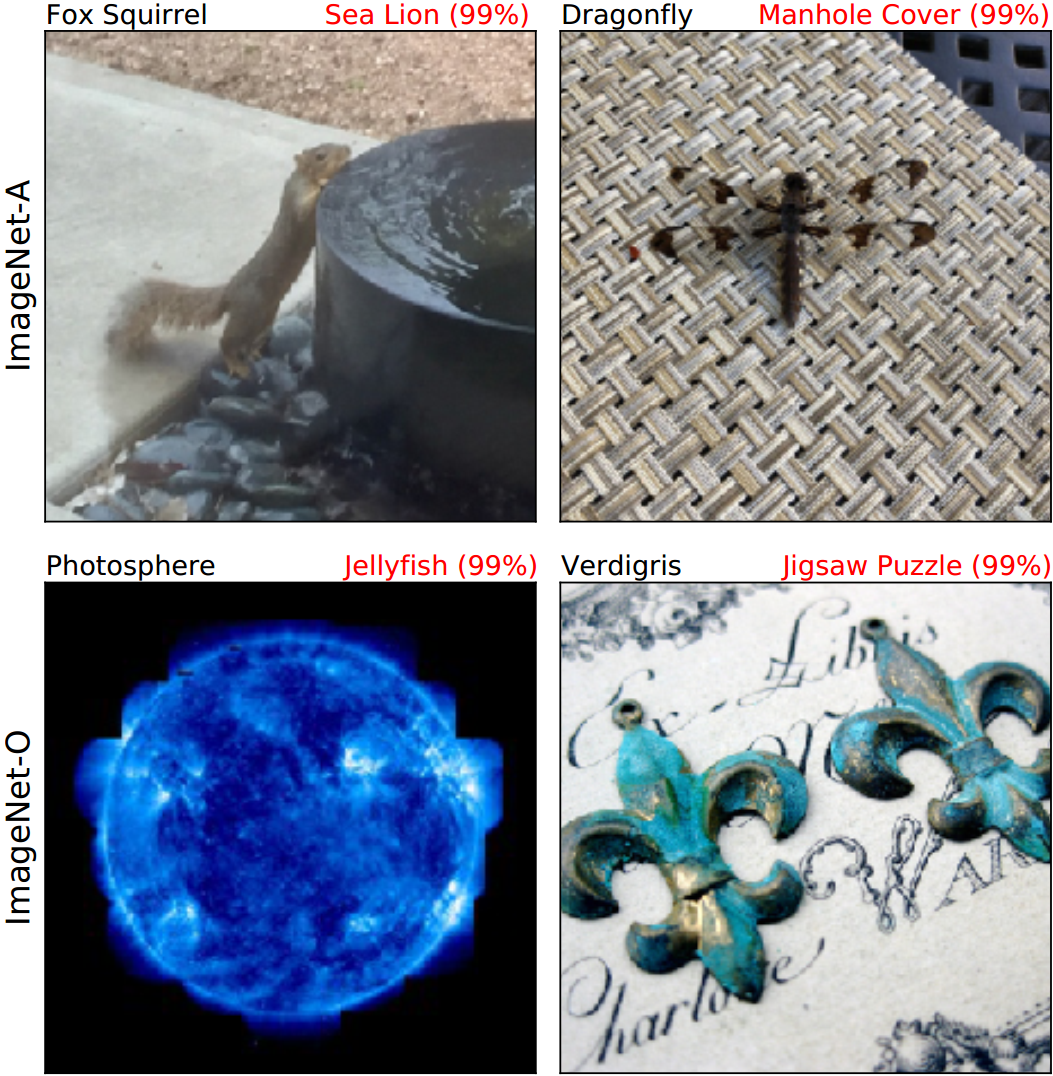
ImageNet-A 数据集包含一些天然的对抗样本。它的结构和 ImageNet 类似,没有经过人为的噪声扰动,但天然地难以被正确分类。在论文的摘要中,常见的视觉分类模型在 ImageNet-A 的准确率只有 2%。
ImageNet-O 包含在 ImageNet-1k 数据集中未包含的类别的图像,这个数据集用于测试模型的超分布检测(out-of-distribution detection)能力,即模型面对从未遇到过的类别的时候,是否能够知道这个类别是超分布的。
Note
下图中,黑色代表图片的真正类别,红色代表 ResNet 预测的类别。在 ImageNet-A 中的类别是模型见到过的,但是预测错误的;在 ImageNet-O 中的类别是模型没见过的,但却笃定地预测的。
论文(CVPR 2021): Natural Adversarial Examples (arxiv.org)
Github(数据集以及代码):hendrycks/natural-adv-examples: A Harder ImageNet Test Set (CVPR 2021) (github.com)
ImageNet-C and ImageNet-P
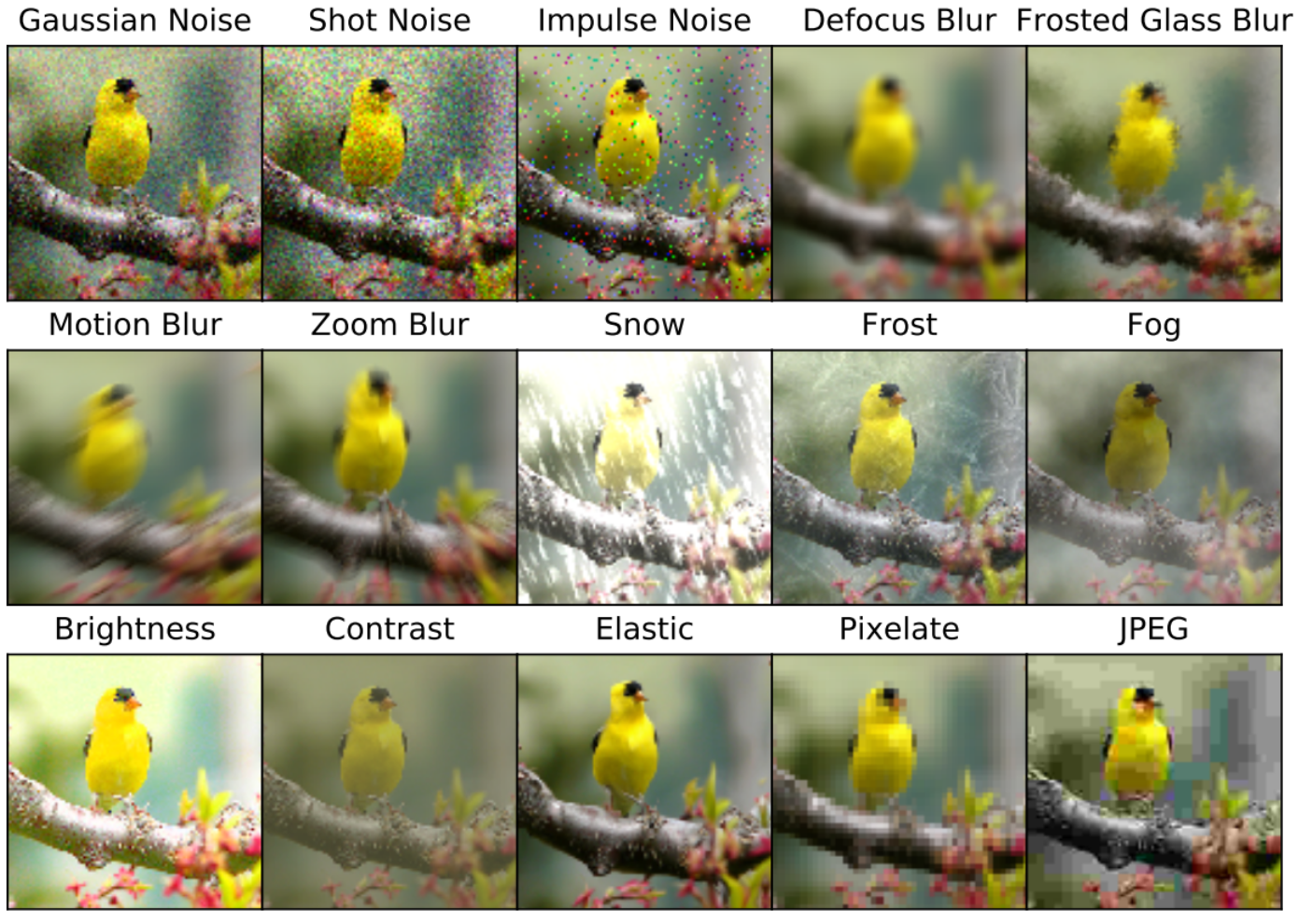
ImageNet-C 的目标是测试模型的 corruption robustness,它对ImageNet 1K添加了一些 15 种图像损坏(模糊、噪声、天气、数字变化),以评估分类器在面对这些损坏时的性能。每种损坏类型有五种严重程度(severity),分别代表不同程度损坏。

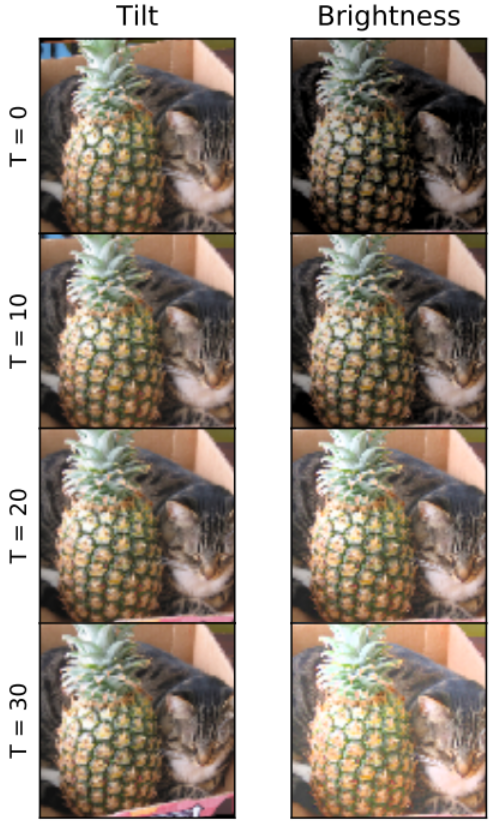
ImageNet-P 的目标是测试模型的 perturbation robustness,提供了扰动的序列,即提供多张扰动的样本,每一张扰动样本都是基于其前一时刻的扰动结果的叠加。比如在下图的左侧的倾斜扰动中,每一次倾斜都是从上一次倾斜的结果继续倾斜的。包含动态模糊、缩放模糊、雪、亮度、旋转、倾斜等。
论文链接(ICLR 2019):Benchmarking Neural Network Robustness to Common Corruptions and Perturbations (arxiv.org)
GitHub:hendrycks/robustness: Corruption and Perturbation Robustness (ICLR 2019) (github.com)
Integrated gradients
集成梯度(Intergrated gradients),计算的是图像
Integrated gradients 拥有一个性质,即“实现不变性”(Implementation invariance),不同于直接计算计算梯度的方法,Intergrated gradients 不会受网络具体结构的影响,而仅仅取决于网络的输入和输出(也可以理解为是网络的功能)。我觉得这应该归因于其是多次从网络中取样的,最终对取样的结果做聚合,而不是用一次输入和输出的梯度来作为结果。
Attention Map 可视化
使用 Attention Map 的可视化来分析损坏样本对模型注意力的影响。这种方法可以借鉴。
ngobahung/Visulization_Attention_Map (github.com)

References
1 | @inproceedings{dan2019benchmarking, |